IMSシリーズは台車の上にIMU(慣性計測装置)を搭載した鉄道用軌道計測器です。
従来のトータルステーションによる追尾式の計測方法ではトータルステーションと台車間の通信設定に20分程準備時間がかかりましたが、本製品では台車のみでの計測が可能となったため準備時間が大きく短縮されました。
IMUの計測精度も座標誤差は150mで1mm、方位誤差は0.02°と非常に性能が高く、トータルステーションによる追尾式と同等の計測精度となっています。
これにより台車1台のみで軌道の絶対線形を取得する事が出来ます。
絶対線形をもとに正矢計算を行うため、長波長計測も300m弦で±3㎜と言う高精度で行う事が可能となっています。
機器の概要

IMSシリーズは軌道上を移動させることが出来る構造を持っています。台車にIMU(慣性計測装置)を搭載し、軌道上をどのように移動したかを記録します。
移動ルートの座標情報と、カント、ゲージセンサーからの情報を組み合わせることで詳細な軌道情報を計測することが可能となります。
IMS1000ではトータルステーションが、IMS3000ではプロファイラ110がポイント計測器として搭載されており、これらを使用してコントロールポイント(既知点)からの自身の座標の計測したり、周辺構造物の座標の取得を行う事が可能となります。
特長

組立式の機器
搬入、撤収経路は問いません。組立、分解も容易であり、短時間で計測準備を行う事が可能です。
計測方法
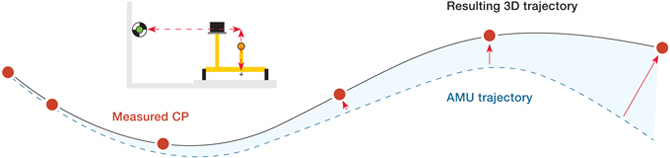
まず既知点からポイント計測器を使用して自分自身の場所を算出します。
その後は台車を移動するだけでIMUが移動量を算出し軌道中心の座標を連続的に計測します。
ただし、IMUは移動量が増えると測定誤差が増えていきます。
移動の途中で開始時と同様に既知点を計測することで現在地の補正が自動的に行われ高精度の軌道座標の測定が可能となります。
計測精度は既知点の計測頻度に依存します。100mごとに計測する場合は3mmの測定誤差、500mごとに計測する場合10mmの測定誤差が発生します。

また、測定途中で周辺構造物の位置座標を計測する事も可能です。
信号機、ホーム端、キロポストなどを構造物にレーザーを照射する事で照射した位置の座標を計測データとして保存出来ます。
取得データ
軌道情報の表示、出力
軌間、水準、平面性など軌道情報の標準的なデータを表示、出力出来ます。
MTT用線形データ
マルチプルタイタンパ(マルタイ)による保守作業の前後の計測を想定した線形データを表示、出力出来ます。
データはプラッサー(WinALC)、マティサ(CATT)など各社のデータ形式で入出力が可能で、GRP1000で計測したデータをマルチプルタイタンパに読み込ませる事が出来ます。
土木用座標データ
IMS1000/3000で計測した緯度経度の情報を表示、出力出来ます。
このデータを使用する事で現在レールがある実際の座標を把握する事が可能となります。